-
R9700 跑 TRELLIS.2 ROCm:先把能跑的路徑整理出來
這份工具箱不是要把 TRELLIS.2 重新包成一個完整產品。比較實際的目標是:在 AMD Radeon AI PRO R9700 這張卡上,先整理出一條可以重現的 image-to-3D 測試流程。
R9700 的硬體規格看起來很適合做本地 AI Lab,但 ROCm、RDNA4、3D 生成模型這幾個東西湊在一起,細節其實不少。官方或社群專案通常會先以 NVIDIA / CUDA 當主要路徑,AMD 這邊常常要自己補一段。
為什麼要另外整理一包
我測的是 TRELLIS.2 的 ROCm fork 。模型本身可以跑,問題主要卡在高品質輸出時的貼圖與 mesh 後處理。
原本的 textured GLB export 會走 GPU BVH 路徑,其中有一段
cumesh.cuBVH.unsigned_distance()。在 R9700 / gfx1201 的 ROCm 環境下,這段有機會讓 HIP 進入 illegal state。不是模型完全不能跑,而是輸出流程跑到這裡會炸。所以這個 repo 做了兩件事:
- 固定一個可以重現的 ROCm 容器環境
- 把貼圖投影改成 CPU KDTree fallback,避開目前不穩的 GPU BVH 路徑
這不是最快的做法,但至少可以把 textured GLB 生出來。
目前可用的路徑
目前測過比較穩的設定是:
texture_size=4096 decimation_target=1000000 remesh=False OVOXEL_PROJECTION_MODE=cpu_kdtree OVOXEL_CPU_KDTREE_K=8remesh=False是刻意的。原本remesh=True看起來比較漂亮,但它還是會碰到同一條 GPU BVH distance path。只要那段 native ROCm extension 還沒修好,高品質設定就不能只看參數名稱,還要看它底下實際呼叫了什麼。測試紀錄:robot 4096 版
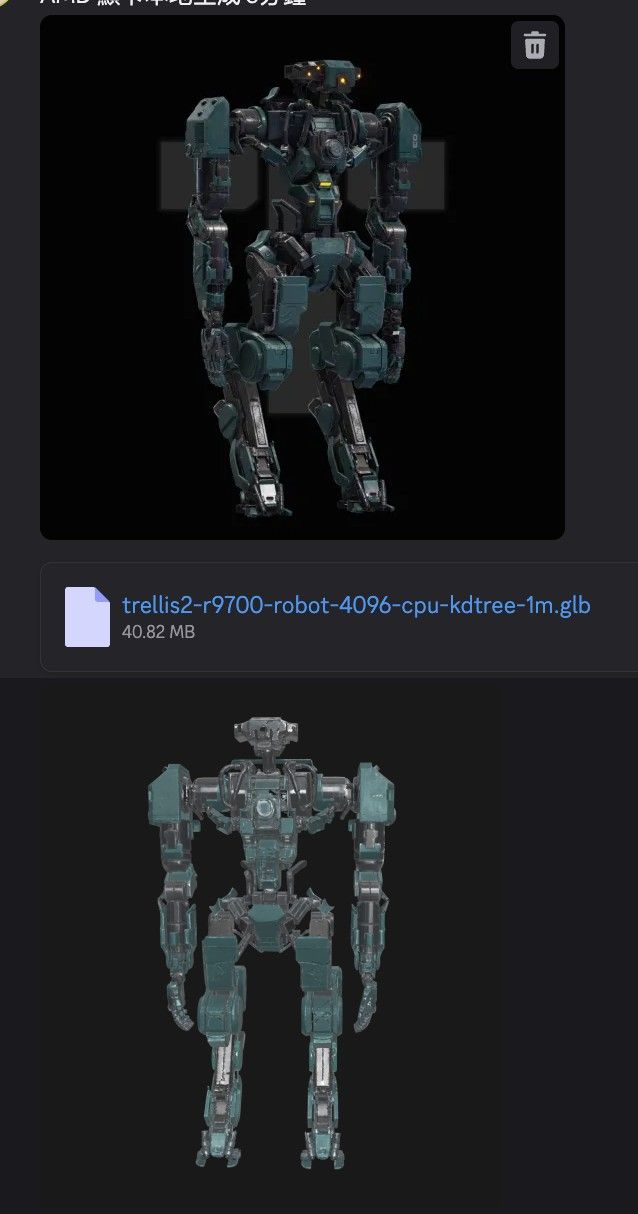
這次測試用 4096 texture 設定,目標是先確認高解析貼圖能不能穩定完成,而不是追求最快速度。
設定如下:
texture_size=4096 decimation_target=1000000 remesh=False OVOXEL_PROJECTION_MODE=cpu_kdtree OVOXEL_CPU_KDTREE_K=8輸出結果:
GLB size: 約 41MB final mesh: 823,375 vertices / 954,302 faces valid texture pixels: 8,331,054 CPU projection mean distance: 3.255e-05 CPU projection max distance: 0.003561 GLB check: materials=1, textures=2, images=2, baseColorTexture exists這次 robot 4096 版大約花了 6 分 50 秒。
時間拆開看:
階段 時間 備註 啟動 / 載入 pipeline 約 1 分鐘多 第一次啟動會花時間載入模型與 pipeline 模型生成 / sampling / decode 約 2 分 50 秒 從開始跑圖到 to_glb開始前GLB 匯出總時間 約 2 分 49 秒 22:23:22 開始 to_glb,22:26:11 完成4096 texture baking + CPU projection 約 2 分 35 秒 4096 貼圖解析度下最重的一段 CPU KDTree projection 本身 約 2 分 23 秒 22:23:36 開始,22:25:59 完成 最耗時的是這段:
CPU KDTree projection: querying 8,331,054 points它要處理 833 萬個 texture points。換句話說,4096 貼圖解析度主要就是卡在這裡。CPU KDTree fallback 可以避開 ROCm GPU BVH 的問題,但代價就是 texture baking 會變成 CPU 工作。
使用方式
先 build 容器:
podman build -t localhost/r9700-trellis2-rocm-toolbox:latest .模型不要放進 repo,也不要打進 image。建議把模型目錄掛到
/models:MODEL_ROOT=$HOME/ai-models \ WORK_ROOT=$PWD/work \ scripts/run-container.sh進容器後跑輸出:
cd /workspace/TRELLIS.2_rocm source /workspace/.venv/bin/activate export OVOXEL_PROJECTION_MODE=cpu_kdtree export OVOXEL_CPU_KDTREE_K=8 export HF_HOME=/models/huggingface export HUGGINGFACE_HUB_CACHE=/models/huggingface/hub export XDG_CACHE_HOME=/models/cache python /opt/r9700-trellis2/scripts/run-textured-export.py \ --input /workspace/TRELLIS.2_rocm/assets/example_image/T.png \ --output /workspace/work/sample-4096.glb \ --texture-size 4096 \ --decimation-target 1000000這包適合誰
如果你只是想要最省事地跑 3D 生成,NVIDIA 環境目前還是比較少坑。
但如果你手上已經有 R9700,或是想測 AMD AI 生態,這包可以省掉一些重複踩坑的時間。
後續想補的東西
- 把 Web UI 的流程也整理成可重現版本
- 補一份 build 時間與生成時間紀錄
- 測不同
texture_size對品質與時間的影響 - 等 ROCm / native extension 更新後,再回頭測
remesh=True
https://github.com/CS6/r9700-trellis2-rocm-toolbox
-
我怎麽感覺我的CPU是瓶頸啊


我有打開官方推薦說的remesh
texture_size=4096 decimation_target=1000000 remesh=True torch=2.11.0+cu130 cuda=13.0 device=NVIDIA RTX PRO 4500 BlackwellGLB size: about 39.9 MiB (41,854,640 bytes) final mesh: 770,210 vertices / 979,967 faces valid texture pixels: 16,776,431 GLB check: materials=1, textures=2, images=2, baseColorTexture exists階段 時間 備註 啟動 / 載入 pipeline 約 58 秒 載入模型與 pipeline,未計入 measured_compute_seconds 模型生成 / sampling / decode 約 2 分 2 秒 從開始跑圖到 to_glb 開始前 mesh simplify 約 0 秒 pipeline 後、GLB 匯出前的 simplify 呼叫 GLB 匯出總時間 約 46 秒 to_glb、texture baking、remesh、xatlas、glb export measured compute total 約 2 分 48 秒 pipeline + simplify + video + export - GLB size: 41,854,640 bytes, about 39.9 MiB - Final mesh: 770,210 vertices / 979,967 faces - Valid texture pixels: 16,776,431 - Model generation / sampling / decode: 約 2 分 2 秒 - GLB export: 約 46 秒 - Measured compute total: 約 2 分 48 秒整個測試過程Markdown
trellis2-cuda.zip -
我怎麽感覺我的CPU是瓶頸啊
我有打開官方推薦說的remesh
texture_size=4096 decimation_target=1000000 remesh=True torch=2.11.0+cu130 cuda=13.0 device=NVIDIA RTX PRO 4500 BlackwellGLB size: about 39.9 MiB (41,854,640 bytes) final mesh: 770,210 vertices / 979,967 faces valid texture pixels: 16,776,431 GLB check: materials=1, textures=2, images=2, baseColorTexture exists階段 時間 備註 啟動 / 載入 pipeline 約 58 秒 載入模型與 pipeline,未計入 measured_compute_seconds 模型生成 / sampling / decode 約 2 分 2 秒 從開始跑圖到 to_glb 開始前 mesh simplify 約 0 秒 pipeline 後、GLB 匯出前的 simplify 呼叫 GLB 匯出總時間 約 46 秒 to_glb、texture baking、remesh、xatlas、glb export measured compute total 約 2 分 48 秒 pipeline + simplify + video + export - GLB size: 41,854,640 bytes, about 39.9 MiB - Final mesh: 770,210 vertices / 979,967 faces - Valid texture pixels: 16,776,431 - Model generation / sampling / decode: 約 2 分 2 秒 - GLB export: 約 46 秒 - Measured compute total: 約 2 分 48 秒整個測試過程Markdown
trellis2-cuda.zip -
CPU
我把cpu 降到跟你差不多的條件試試
但 cuda 可以走 BVH 處理 texture baking 真的好快... -
 T terry 于 将此主题从 AI音视频画图 移至此处
T terry 于 将此主题从 AI音视频画图 移至此处
-
T terry 于 将此主题固定
-
TRELLIS.2 外部主機實驗紀錄與 GPU 結果摘要
實驗資料夾:
external-host-experiments/2026-06-07-vastai-trellis2目前狀態:
所有 Vast.ai instance 都已關閉。 最後確認 `vastai show instances-v1 --raw` 回傳 total_instances=0。本次主要目標:
用外部 NVIDIA GPU 主機測試 TRELLIS.2。 固定使用 robot.jpeg 做 3D 生成,觀察 2048 / 4096 texture 輸出結果。 特別關注 RTX 3090 是否值得購入實體卡片:24GB VRAM 是否足夠、4096 是否能成功、正式生成時間如何。測試素材
主要輸入圖:
lab-docs/test-assets/robot.jpeg遠端路徑:
/workspace/work/inputs/robot.jpeg另有一筆早期環境 smoke test 使用 TRELLIS.2 官方範例圖:
/workspace/TRELLIS.2/assets/example_image/T.png執行環境與方法
共同設定:
TRELLIS.2 Torch: 2.12.0+cu130 CUDA runtime: 13.0 Attention backend: flash_attn Sparse conv backend: flex_gemm decimation_target=1000000 remesh=1 write_video=0 GLB export: extension_webp=False背景移除狀態:
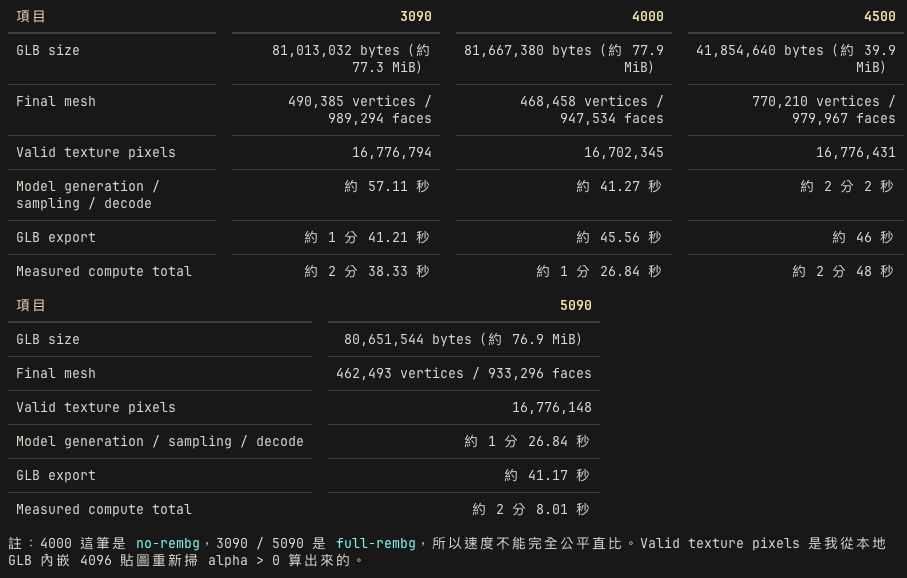
RTX PRO 4000 早期測試:no-rembg 原因:當時 briaai/RMBG-2.0 gated access 尚未完成授權。 RTX 3090 / RTX 5090 測試:full rembg 原因:後續 Hugging Face token 已登入,briaai/RMBG-2.0 可下載並正常使用。重要比較限制:
RTX PRO 4000 的 no-rembg 結果不能直接和 RTX 3090 / RTX 5090 的 full-rembg 結果做嚴格速度比較。 它仍可作為 CUDA 環境與 no-rembg pipeline 的參考。GPU 結果摘要
每個 benchmark 內部階段的拆表見:
gpu-stage-timing.zh-TW.mdGPU 模式 Texture Wall time Measured compute Pipeline Export Max RSS GLB RTX 3090 24GB full rembg 2048 6:27.50 214.09s 148.77s 65.32s 25,560,468 KB outputs/rtx3090-robot-2048-rembg.glbRTX 3090 24GB full rembg 4096 4:49.14 158.33s 57.11s 101.21s 25,473,892 KB outputs/rtx3090-robot-4096-rembg.glbRTX 5090 32GB full rembg 4096 3:15.19 128.01s 86.84s 41.17s 26,572,504 KB outputs/rtx5090-robot-4096-rembg.glbRTX PRO 4000 Blackwell 24GB no-rembg 2048 2:39.94 100.77s 76.89s 23.87s 24,259,192 KB outputs/rtxpro4000-robot-2048-no-rembg.glbRTX PRO 4000 Blackwell 24GB no-rembg 4096 2:26.62 86.84s 41.27s 45.56s 24,675,052 KB outputs/rtxpro4000-robot-4096-no-rembg.glb結論
RTX 3090 的重點結論:
RTX 3090 24GB 可以完整跑 TRELLIS.2 robot 4096 + RMBG。 4096 full-rembg 成功輸出 GLB,沒有 OOM。 正式 4096 wall time 是 4:49.14。對購買實體 RTX 3090 的判斷:
顯卡本身可行,24GB VRAM 足夠完成這次 4096 測試。 第一次安裝環境會很慢,主要是 flash-attn / native CUDA extensions 編譯。 這是初次部署成本,不是每次生成都會發生。 如果購買實體卡,建議保留 Python 環境、wheel cache,或直接做預建 Docker image。CPU / GPU 負載判斷:
環境建置時間主要卡在 CPU、編譯器、磁碟 I/O。 正式生成階段才主要使用 GPU。 GLB export、xatlas UV、mesh/texture 後處理仍會吃不少 CPU。完整流水紀錄
1. 建立外部主機實驗資料夾
建立資料夾集中保存租借外部主機的實驗資料:
external-host-experiments/2026-06-07-vastai-trellis2內容包含:
notes.md gpu-results-summary.md gpu-results-summary.zh-TW.md logs-export.md outputs/ logs/ scripts/2. Vast.ai CLI 與 SSH key
先安裝並設定 Vast.ai CLI,建立新的 SSH key 給租借主機使用。
後續操作使用 CLI 建立、查詢、關閉 instances,並用 SSH/SCP 上傳 benchmark harness、下載 GLB 與 logs。
3. 初始指定機器
原先記錄的機器建立命令:
vastai create instance 35865076 \ --image pytorch/pytorch:2.6.0-cuda12.4-cudnn9-devel \ --disk 180 \ --ssh \ --direct \ --env '-p 7860:7860' \ --label trellis2-smoke選擇理由:
偏好 AMD CPU。 價格可控。 VRAM 24GB,足夠做 TRELLIS.2 smoke test。4. RTX PRO 4000 第一次嘗試
Instance:
Instance ID: 39881802 Offer ID: 35865076 GPU: NVIDIA RTX PRO 4000 Blackwell CPU: AMD Ryzen Threadripper PRO 5945WX 12-Cores主要問題:
起初使用 pytorch/pytorch:2.6.0-cuda12.4-cudnn9-devel。 後續 TRELLIS.2 setup 需要 CUDA 13 / PyTorch cu130 路線。 CUDA 12.4 + RTX PRO 4000 Blackwell sm_120 不適合。處理過程:
改回 CUDA 13 + torch 2.12.0+cu130。 nvdiffrast、nvdiffrec_render、cumesh、o_voxel、flex_gemm 可成功編譯與 import。 但 flash-attn 2.7.3 現場編譯 sm_120 花太久。 依使用者指示停止該輪,關閉 instance。結論:
手動從 PyTorch CUDA 12.4 image 開始不理想。 RTX PRO 4000 Blackwell 應走 CUDA 13 / PyTorch cu130。 更好的做法是沿用 RTX PRO 4500 測試提供的 CUDA benchmark harness 或預建 image。5. RTX PRO 4000 CUDA 13 成功跑通
Instance:
Instance ID: 39888728 GPU: NVIDIA RTX PRO 4000 Blackwell, 24467 MiB CPU: AMD Ryzen Threadripper PRO 5945WX 12-Cores Image: nvidia/cuda:13.0.2-cudnn-devel-ubuntu22.04成功項目:
TRELLIS.2 CUDA 13 環境完成。 flash-attn / native extensions 可用。限制:
當時 briaai/RMBG-2.0 尚未授權,因此改用 no-rembg。 benchmark 使用 preprocess_image=False。官方範例圖 smoke test:
Input: /workspace/TRELLIS.2/assets/example_image/T.png Texture: 2048 Output: outputs/rtxpro4000-smoke-2048-no-rembg-v6.glb Wall time: 2:34.81 Measured compute: 95.6548srobot 2048:
Output: outputs/rtxpro4000-robot-2048-no-rembg.glb Log: logs/rtxpro4000-robot-2048-no-rembg.log Wall time: 2:39.94 Measured compute: 100.7658s File size: about 48 MBrobot 4096:
Output: outputs/rtxpro4000-robot-4096-no-rembg.glb Log: logs/rtxpro4000-robot-4096-no-rembg.log Wall time: 2:26.62 Measured compute: 86.8375s File size: about 78 MB完成後下載 GLB/log,關閉 instance。
6. 搜尋 3090 / 4080S / 5090
使用 Vast.ai 查詢可租用主機,偏好 AMD CPU。
4080S:
曾建立一台 4080S instance。 使用者後續指示關掉。 已 destroy,不再繼續跑。3090:
重點卡片,因為使用者正在評估是否購買實體 RTX 3090。5090:
使用者指示 5090 跑完 4096 後立刻關閉。7. RTX 5090 full-rembg 4096 測試
Instance:
Instance ID: 39911711 Label: trellis2-rtx5090-robot-b GPU: NVIDIA GeForce RTX 5090, 32607 MiB CPU: AMD EPYC 9655 96-Core Processor Image: nvidia/cuda:13.0.2-cudnn-devel-ubuntu22.04建置:
安裝 PyTorch 2.12.0+cu130。 安裝 TRELLIS.2 dependencies。 第一次 setup 遇到 flash-attn pip build isolation 看不到 torch 的錯誤。 改用 python3 -m pip install flash-attn==2.7.3 --no-build-isolation 成功。 nvdiffrast、nvdiffrec_render、cumesh、flex_gemm、o_voxel 全部 import OK。Hugging Face:
登入 HF token 後,briaai/RMBG-2.0 與 facebook/dinov3-vitl16-pretrain-lvd1689m 都可下載。正式測試:
Input: robot.jpeg Texture size: 4096 Mode: full rembg Output: outputs/rtx5090-robot-4096-rembg.glb Log: logs/rtx5090-robot-4096-rembg.log結果:
Wall time: 3:15.19 Load: 62.9314s Pipeline: 86.8388s Export: 41.1694s Measured compute: 128.0098s Max RSS: 26,572,504 KB File size: about 77 MB完成後:
下載 GLB/log。 立刻 destroy instance 39911711。8. RTX 3090 full-rembg 2048 / 4096 測試
Instance:
Instance ID: 39911959 Label: trellis2-rtx3090-robot-b GPU: NVIDIA GeForce RTX 3090, 24576 MiB CPU: AMD EPYC 7642 48-Core Processor Image: nvidia/cuda:13.0.2-cudnn-devel-ubuntu22.04建置瓶頸:
RTX 3090 的環境建置主要卡在 flash-attn 2.7.3 source build。 原因是 CUDA 13 + sm_86 沒有直接拿到可用的預編譯 wheel,pip 從 source 編整套 kernels。 這段主要吃 CPU、編譯器與磁碟 I/O,GPU 幾乎沒在跑。使用者確認:
即使燒到 20 美元也沒關係,重點是要知道 3090 結果。 因此沒有因建置時間過長而停止。完成建置:
flash-attn build 完成。 nvdiffrast、nvdiffrec_render、cumesh、flex_gemm、o_voxel 全部 import OK。Hugging Face:
登入 HF token。 確認 briaai/RMBG-2.0 與 facebook/dinov3-vitl16-pretrain-lvd1689m 都可下載。3090 robot 2048:
Output: outputs/rtx3090-robot-2048-rembg.glb Log: logs/rtx3090-robot-2048-rembg.log Wall time: 6:27.50 Load: 163.8570s Pipeline: 148.7663s Export: 65.3185s Measured compute: 214.0916s Max RSS: 25,560,468 KB File size: about 48 MB3090 robot 4096:
Output: outputs/rtx3090-robot-4096-rembg.glb Log: logs/rtx3090-robot-4096-rembg.log Wall time: 4:49.14 Load: 121.8544s Pipeline: 57.1088s Export: 101.2109s Measured compute: 158.3274s Max RSS: 25,473,892 KB File size: about 77 MB3090 觀察:
24GB VRAM 成功完成 2048 與 4096 full-rembg 測試。 沒有 OOM。 4096 export 較重,export_seconds 達 101.2109s。 正式 2048/4096 測試合計約 11 分 17 秒,不含第一次環境建置。完成後:
下載 GLB/log。 destroy instance 39911959。 再次確認 Vast.ai 沒有剩餘 instance。產物清單
GLB:
outputs/rtxpro4000-smoke-2048-no-rembg-v6.glb outputs/rtxpro4000-robot-2048-no-rembg.glb outputs/rtxpro4000-robot-4096-no-rembg.glb outputs/rtx5090-robot-4096-rembg.glb outputs/rtx3090-robot-2048-rembg.glb outputs/rtx3090-robot-4096-rembg.glbLogs:
logs/rtxpro4000-smoke-2048-no-rembg-v6.log logs/rtxpro4000-robot-2048-no-rembg.log logs/rtxpro4000-robot-4096-no-rembg.log logs/rtx5090-robot-4096-rembg.log logs/rtx3090-robot-2048-rembg.log logs/rtx3090-robot-4096-rembg.logMarkdown 彙整:
notes.md gpu-results-summary.md gpu-results-summary.zh-TW.md logs-export.md後續建議
- 之後要租 3090 / 4080S / 5090 做同類測試,先做預建 Docker image。
- 預建 image 內應包含 PyTorch cu130、flash-attn、nvdiffrast、nvdiffrec_render、cumesh、flex_gemm、o_voxel。
- 3090 實體機若要長期使用,建好環境後應保留 wheel cache,避免重複編譯。
- RTX PRO 4000 需要重跑 full-rembg,才能和 3090 / 5090 做公平速度比較。
- AMD R9700 的 ROCm 結果應另列,因為它使用 CPU KDTree fallback,不能直接視為同一條 pipeline。
-
4080S 32GB 重點結果:
- 有效 run:rtx4080s32-robot-4096-full-rembg-xformers-detailed
- 使用你的 robot 圖:/workspace/input/robot.jpeg
- 正式 pipeline:microsoft/TRELLIS.2-4B + DINOv3 + RMBG
- Wall time:4:50.15
- Measured compute:146.46s
- Pipeline:54.73s
- to_glb:72.68s
- glb_export:19.05s
- GLB:75M 本機檔案
- GPU memory CSV 峰值:7569 MiB
- Exit status:0
-
系统 于 取消固定此主题